
About Me

I'm a robotics graduate student at the University of Maryland (UMD) having expereince working in computer vision, robotics software, reinforcement learning, multimodal and generative AI, and AR/VR technologies. While currently working at Lucid to enhance the ADAS experience, I'm getting my hands dirty and diving deep into the autonomous driving space.
I was a research assistant at the Perception and Robotics Group (PRG) in UMD headed by Dr. Yiannis Aloimonos where I researched autoencoder-based point cloud pretraining techniques. I researched path planning algorithms for autonomous systems as a part of the Gamma Lab in UMD as well. I've also previously interned at OmniVision where I worked with event camera-assisted 3D reconstruction and spatial video generation. Apart from these experiences, I've also worked at the MarMot Lab in the National University of Singapore, MOIR Lab in IIT Ropar, and Aspiro, Bangalore where I was involved in similar research and projects.
I also work on various personal and academic projects in these areas and open-source my work on GitHub. I enjoy writing and frequently publish technical blogs on Medium as well.
In my free time, I like playing badminton, table tennis, and swimming. I also enjoy going on hikes and exploring new places. I've recently gotten into videography as well! During my time at IIT Ropar, I was an active and core member of the Debating Society (DebSoc) and represented my university at numerous competitions.
Skills
- C & C++
- Python
- MATLAB
- CMake
- PyTorch
- TensorFlow
- CUDA
- TensorRT
- ROS 1 & ROS 2
- Gazebo
- Isaac Sim
- AWS
- Azure
- MySQL & PostgreSQL
- MongoDB
- RISCV-asm
- Git
- Linux
- Docker
- Kubernetes
- Airflow
- OpenCV
- Open3D
- Solidworks
Professional Background
Education
University of Maryland, College Park
Aug 2023 - May 2025 | College Park, MD
M.Eng. in Robotics
- GPA: 4.0/4.0
- Coursework:
- Advanced Computer Vision
- Multimodal Foundation Models
- Robot Learning and Decision Making
- Robot Perception and Planning
- Robot Modeling and Control
- Research: Graduate Research Assistant at the Perception and Robotics Group (PRG) and Gamma Lab
Indian Institute of Technology (IIT) Ropar
July 2018 - May 2023 | Ropar, India
B.Tech - M.Tech (Dual Degree) | Major: Mechanical Engineering | Minor: Computer Science
- GPA: 8.97/10
- Coursework:
- Data Structures and Algorithms
- Computer Architecture
- Databases
- Operating Systems
- Applied Machine Learning
- Computer Vision
- Internet of Things (IoT)
- Probability Theory
- Differential Equations
- Thesis: Mapping, Localization and Navigation of an Autonomous Robot Pursuing Dynamic Targets in Warehouse Environments
- Awards: Institute Silver Medal for the highest GPA in the Mechanical Engineering (Dual Degree) cohort
- Positions of Responsibility: Head Department Coordinator for the Career Development and Placement Cell (CDPC) from May 2021 - May 20-22. Led a team of about 20 people and connected with industry leaders, organized recruitment drives, and conducted professional development activities for students
- Extracurricular Activities: Core Member of the Debating Society. Represented IIT Ropar as a debater and adjudicator in Inter IIT '18, '19, '23, and NSUT Colloquium '19.
Professional Experience
Lucid Motors
Jun 2025 - Present | Newark, CA
ADAS Sensor Data Engineer | ADAS Geo-AI Team
- Developing robust multimodal machine learning solutions for data processing, including temporal data synchronization, camera-only 3D scene reconstruction, and auto-annotation.
- Lead project owner of the auto-parking project, and have directly been responsible for the collection, processing, infrastructure pipelines, quality checks, and delivery of 100k frames of parking data for model development and training.
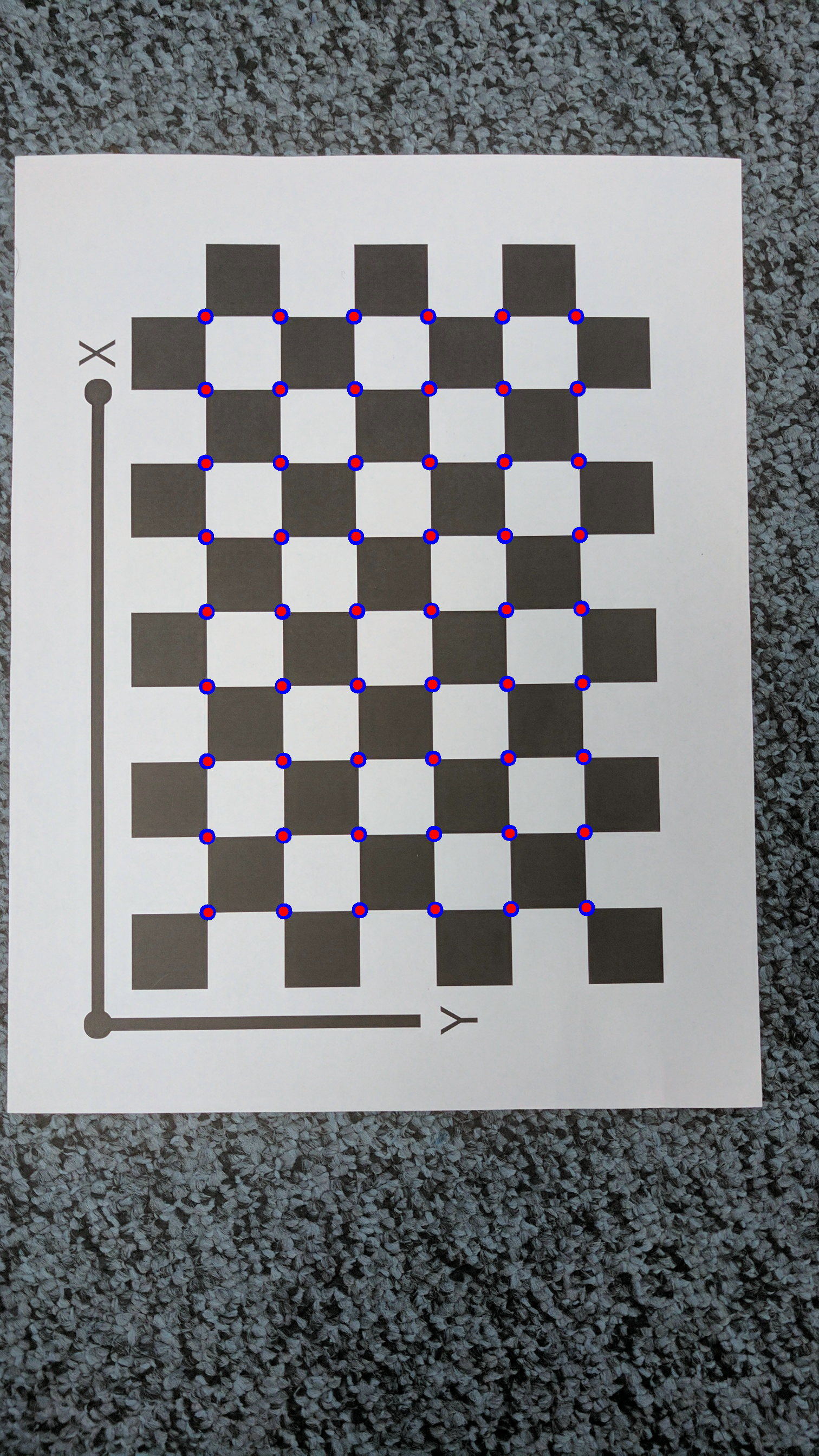
- Enhancing sensor fusion, data synchronization, calibration, and logging capabilities on the test-fleet cars for in-house development, in addition to vendor and partner collaborations.
Gamma and PRG Labs, University of Maryland
Jan 2024 - May 2025 | College Park, MD
Graduate Research Assistant | Guides: Dr. Dinesh Manocha, Dr. Yiannis Aloimonos
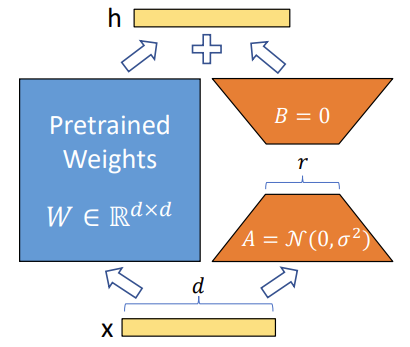
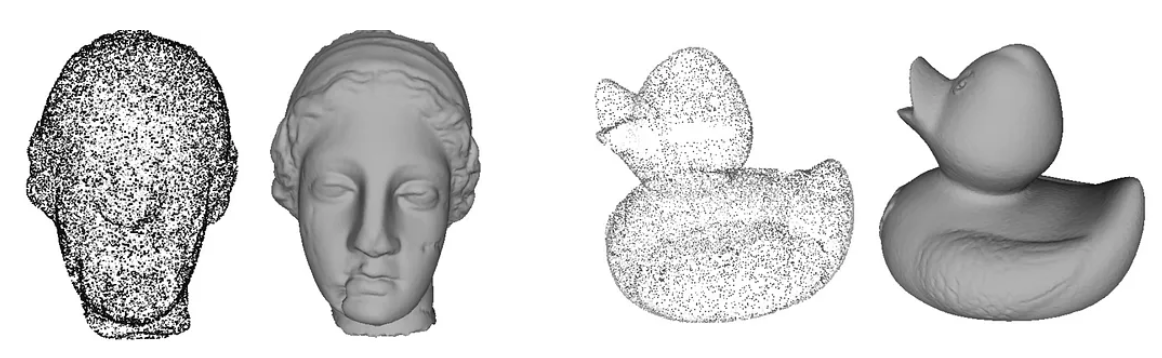
- Formulated and improved point cloud pretraining algorithms using VecKM-based autoencoder models.
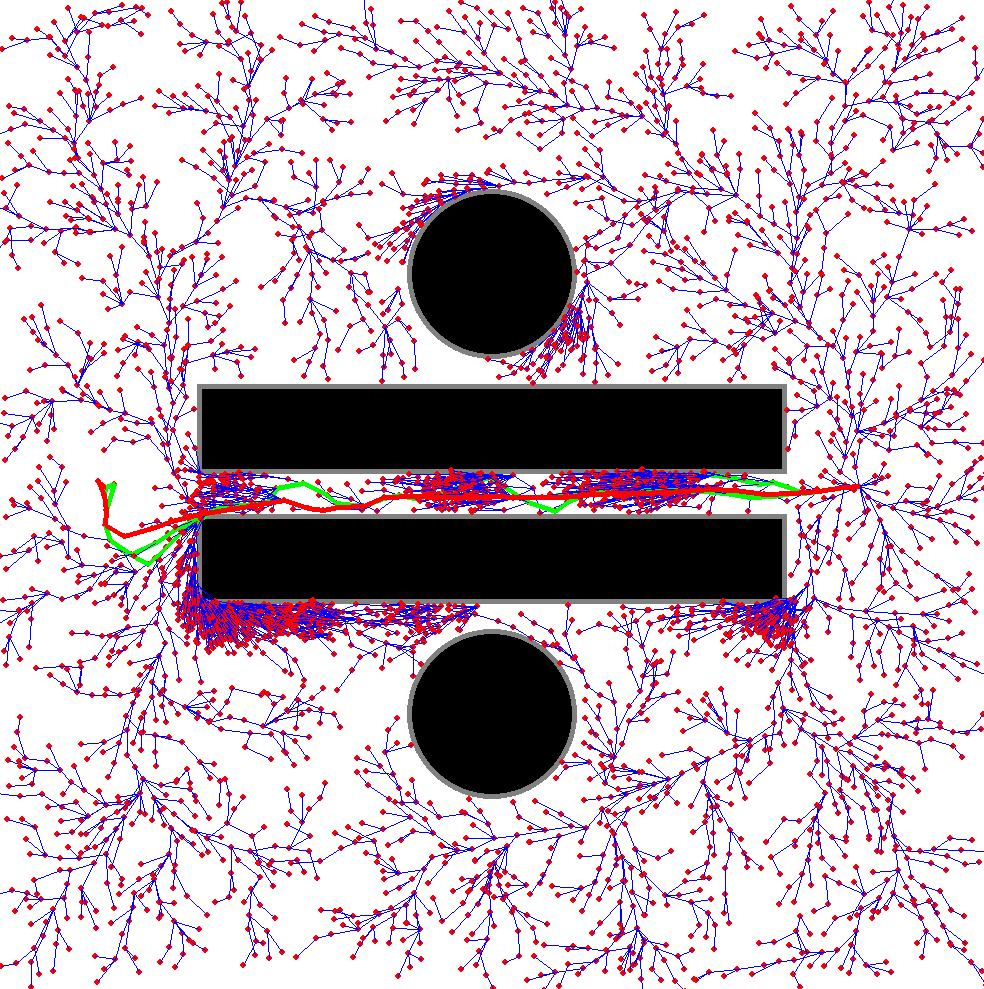
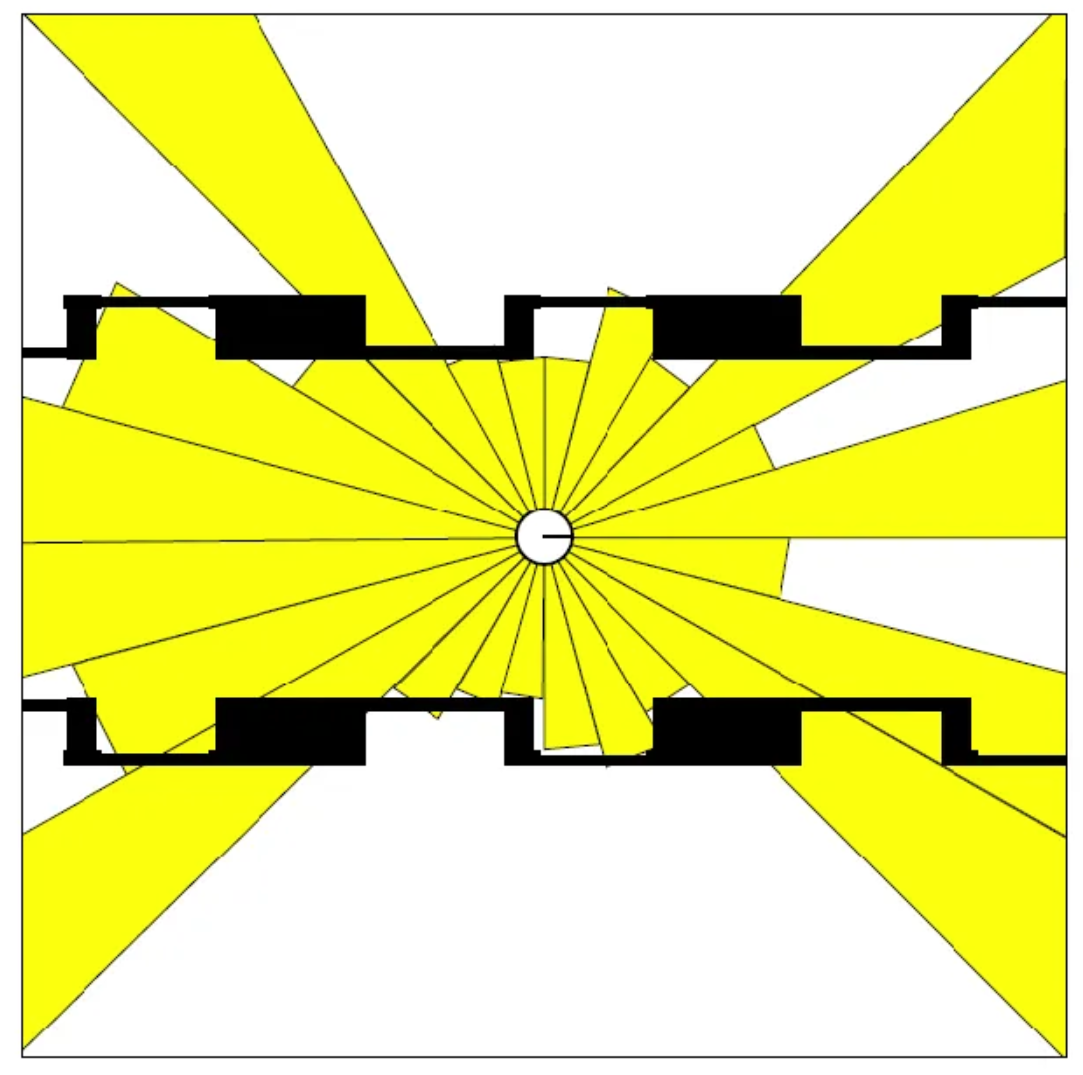
- Developed an autonomous navigation stack (with a custom local and global planner) for the Husky Robot to autonomously navigate campus environments through high-traffic conditions using camera, GPS, lidar, and IMU data.
OmniVision
May - Aug 2024 | Santa Clara, CA
Software Algorithm Intern | Camera Systems Group
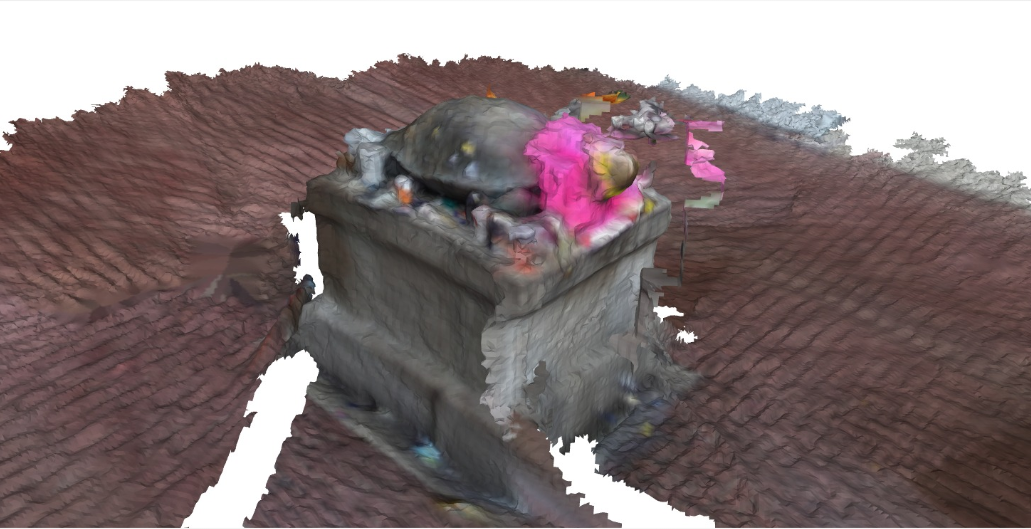
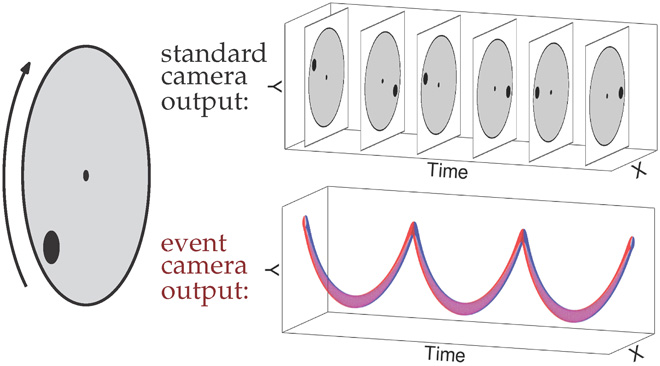
- Devised and developed novel Neural Radiance Fields (NeRF), Gaussian Splatting (GS), and Spatial Video pipelines for optimized rendering, view synthesis, and immersion from OVT image (CIS) and event camera (EVS) sensor data.
- Researched, implemented, and benchmarked EVS 3D reconstruction algorithms including sparse multi-view stereo mapping, dense monocular depth estimation using recurrent CNNs, and dense ToF sensor-based depth interpolation.
MarMot Lab, National University of Singapore
May - Aug 2020 & 2021 | Singapore
Research Intern | Guide: Dr. Guillaume Sartoretti
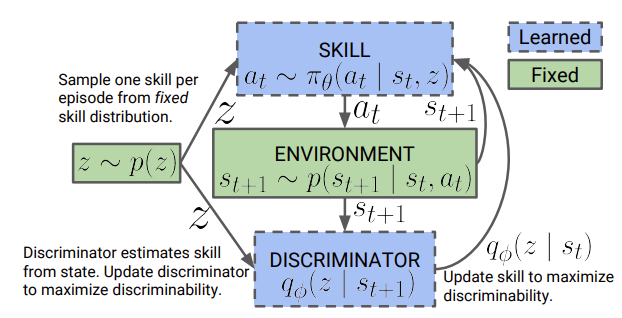
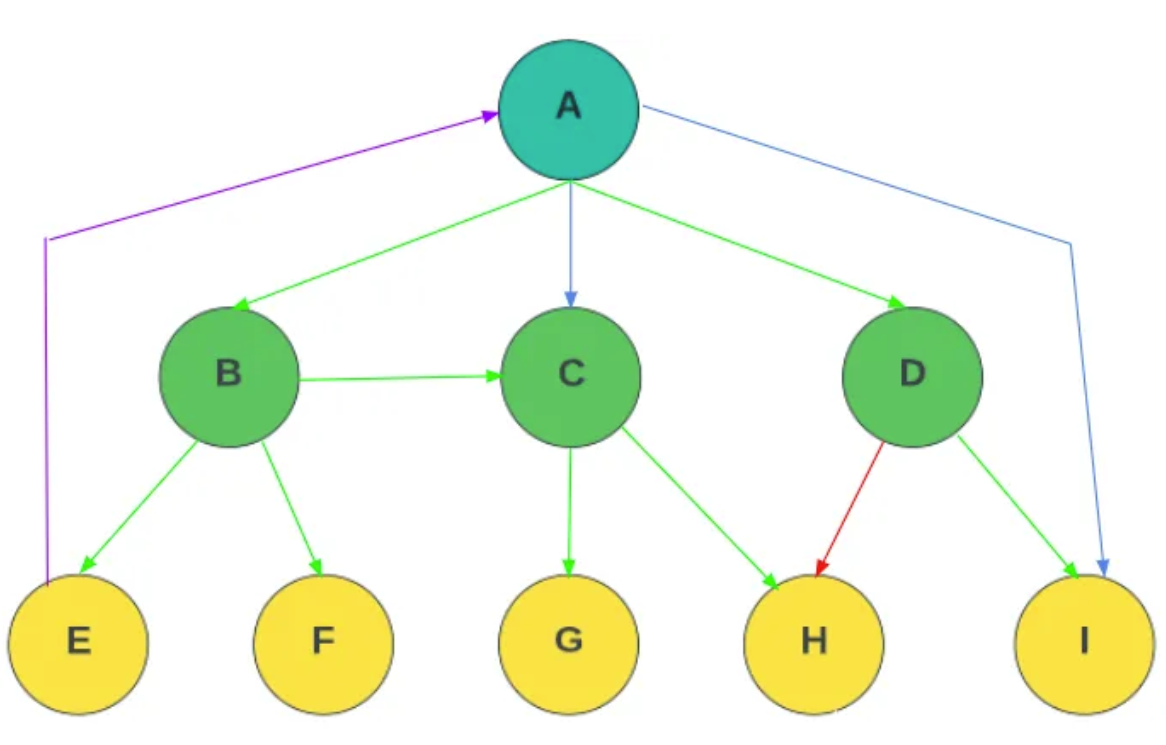
- Developed improved multi-agent pathfinding (PRIMAL) and search algorithms using visual attention and deep reinforcement learning.
- Devised a smart traffic light system using transformers and an expert Conflict-Based Search (CBS) planner to improve NUS’ submission to AI Crowd’s Flatland Challenge.
Aspiro
May - July 2021 | Bangalore, India
Artificial Intelligence Intern | Software Development Group
- Formulated a RASA Chatbot to handle chitchat and fallback cases using DietClassifier and TEDPolicy models.
- Generated functionality for the chatbot to respond to closer and nudger statements using multi-intent classification.
Project Portfolio




Blogs

Awards
IIT Ropar - Institute Silver Medal
April 2024
Awarded IIT Ropar's Institute Silver Medal in recognition of the best academic performance in the mechanical engineering dual-degree cohort.
KVPY Fellowship
April 2018
Awarded the prestigious KVPY SX fellowship by IISC Bangalore in recognition of extraordinary academic capabilities and research potential. Achieved an All India Rank (AIR) of 528 in the selection process for the same.
Hobbies

I enjoy doing a lot of things. I'm generally a very active person and work out regularly to keep myself fit. I like playing and am good at badminton, table tennis, and swimming. On a recent trip to San Diego, I started learning surfing as well!
Since joining university for my undergraduate studies, I've also developed a liking for trekking. I've gone on many treks, both in India and in the US. In India, I've gone on hikes in various places, spanning the Himalayan mountain ranges in Himachal Pradesh and hill stations of southern India. In the US, I've explored many trails in the Shenandoah Valley as well as in California. During my summer internship in 2024, I hiked the trails of Big Sur, Emerald Bay in Lake Tahoe, and the Mist Trail of Yosemite National Park!
I also have a lot of scattered part-time hobbies. I consider myself a foodie and love exploring new cuisines! I enjoy cooking and try replicating, as well as innovating, new recipes. I have also recently gotten into videography and making montages with camera and video feed I record on my GoPro. So far, it's mostly been centered around content I've filmed while hiking and swimming!
I'm fond of and good at public speaking, too. I was a part of IIT Ropar's core debating team and have represented my university in numerous competitions (Inter IIT Cultural Meet '18, '19, '23, and NSUT Colloquium '19) as both a debater and adjudicator.
Like anyone else, I love listening to music. I follow a lot of genres, though my favorites are rock, pop, indie, and everything in between! I used to play the piano in middle school, too, but have been out of touch ever since then. It's something I would really like to get back to sometime in the near future.
I am a very social person and like meeting new people. Whether it's catching up with old friends for a game of Topgolf or solo traveling and meeting new people on a vacation, I am always ready and embrace experiences as they come!